Given a dataset of expert trajectories, standard imitation learning approaches typically learn a direct mapping from observations (e.g., RGB images) to actions. However, such methods often overlook the rich interplay between different modalities, i.e., sensory inputs, actions, and rewards — which is crucial for modeling robot behavior and understanding task outcomes. In this work, we propose Multimodal Diffusion Forcing, a unified framework for learning from multimodal robot trajectories that extends beyond action generation. Rather than modeling a fixed distribution, MDF applies random partial masking and trains a diffusion model to reconstruct the trajectory. This training objective encourages the model to learn temporal and cross-modal dependencies, such as predicting the effects of actions on force signals or inferring states from partial observations. We evaluate MDF on contact-rich, forceful manipulation tasks in simulated and real-world environments. Our results show that MDF not only delivers versatile functionalities, but also achieves strong performance, and robustness under noisy observations.
Cap Installation
Cap Removal
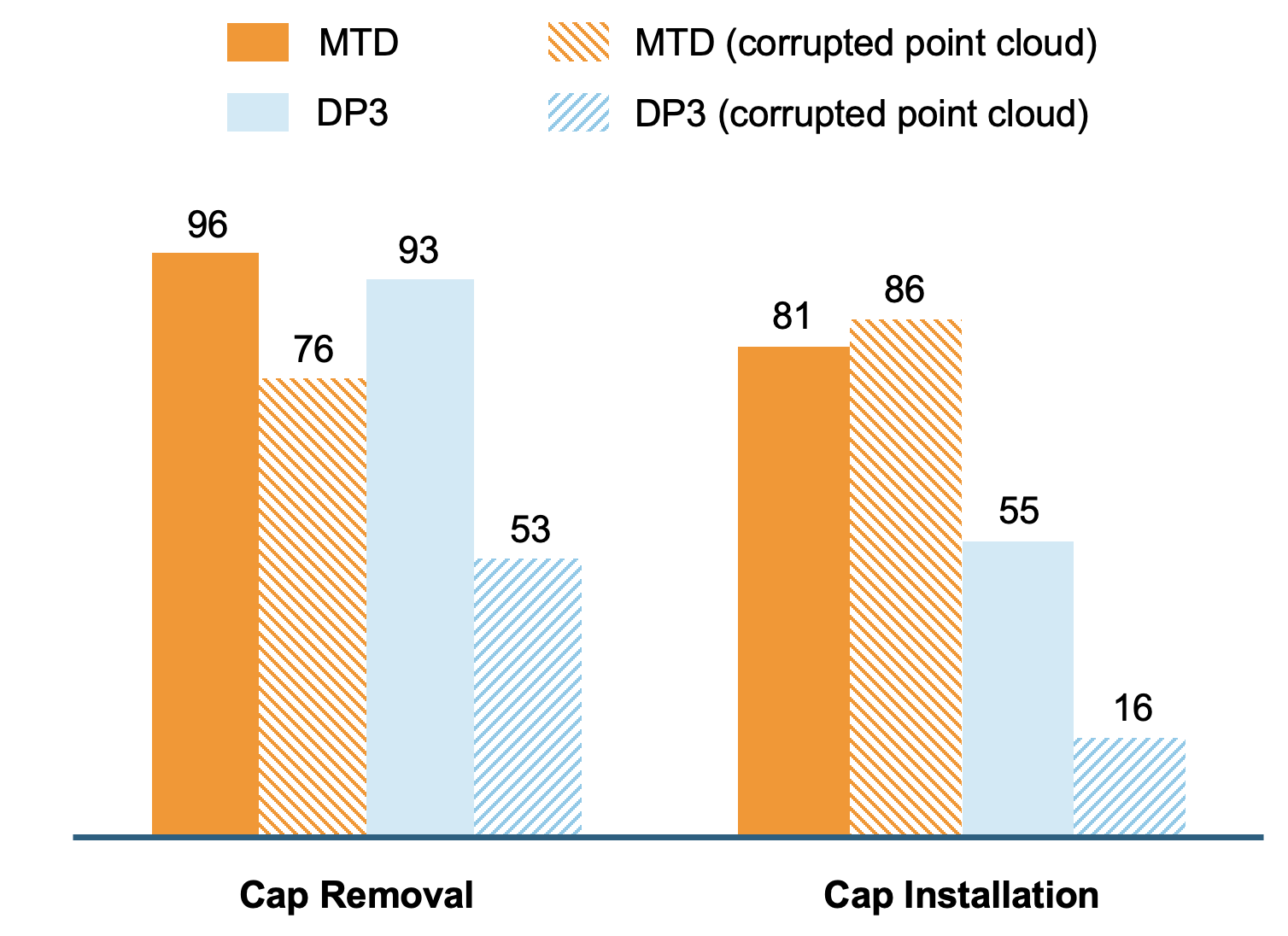
Real-world forceful manipulation evaluation. We run 20 trials per setting (8 settings in total), for 160 trials overall.
Identifying both the timestep and modality of the anomalies.
Visual Distractor
External disturbance
MDF is trained with partially corrupted inputs, which improves its robustness to noisy observations.